- 这一策略的背后,是黄仁勋对“物理AI”的痴迷——他认为自动驾驶是物理AI中最有可能实现大规模部署的产品。
- 英伟达将智能驾驶定义为“三台计算机”问题——车载推理计算机、云端训练计算机和模拟计算机。
- 以“三台电脑”为基础,英伟达将自动驾驶生态布局进一步细化为“五层蛋糕”。这种分层架构的核心逻辑是利用开源模型结合多样化的硬件、工具和能力,覆盖从开发到交付的完整生态系统。
2026年4月,北京车展前夕,英伟达全球副总裁、汽车事业部负责人吴新宙接受了Counterpoint Research的专访,详细阐述了其智能驾驶业务的最新进展与战略布局。在这场深度对话中,一个清晰的图景浮出水面:英伟达正在通过“三台计算机、五层蛋糕”战略,将自身塑造为智能驾驶领域的“生态玩家”。
这一战略的背后,是黄仁勋对“物理AI”的执念——他相信生成式AI、代理式AI与物理AI将推动第四次工业革命,而自动驾驶恰恰是物理AI中最可能率先大规模落地的产品。每年全球车辆行驶里程高达13万亿英里,若未来每英里都能实现自动化,其商业价值难以估量。
1. 智能驾驶的技术架构:“三台计算机+五层蛋糕”的全栈布局
英伟达将智能驾驶定义为“三台计算机”的问题:
- 车端推理计算机:负责实时感知与决策。
- 云端训练计算机:负责模型训练与数据标注。
- 仿真计算机:负责大规模场景验证。
这三台计算机形成一个闭环,从车内数据采集、云模型训练、仿真验证到部署回车辆。 英伟达拥有涵盖所有三个细分市场的功能,从而构建了完整的工具链。
在“三台计算机”的基础上,英伟达进一步将其在自动驾驶的生态布局细化为“五层蛋糕”,具体如下图所示:

来源:英伟达
这种分层架构的核心逻辑是:用开源的模型和多样化的硬件、工具与能力组合,覆盖自动驾驶从开发到交付的完整生态,让车企客户无论从生态中的哪个环节参与都可以受益。

来源:英伟达
2.核心技术突破:推理型智驾的范式革命
英伟达Alpamayo模型的核心卖点之一是“推理型VLA模型”。传统端到端方案的困境在于需要海量驾驶数据覆盖各种极端情况(Corner case)。这就造成了实现自动驾驶的成本高、效率低。而推理型VLA模型引入了两个关键能力来解决传统方案的痛点:
- 基座模型(Foundation Model):Alpamayo的基础模型是基于Cosmos世界模型蒸馏而来,而后者用互联网级别的视频数据训练,天然具备对物理世界的理解能力。虽然基座模型仅拥有8万小时的驾驶数据规模,但其“母体”已学习过海量物理规律,因此泛化能力远超同级别模型。
- 语言推理能力:人类可以通过文字理解“前面是只动物,不能撞它”,而无需亲眼见过鸽子、大象或长颈鹿。同理,引入推理能力后,模型可以通过语言的概括能力处理未见过的场景,极大降低了数据需求。
吴新宙用一个生动的比喻说明这一点:“学开车的新手只需看驾驶手册、开二三十小时车就能拿驾照,因为他已有对物理世界的理解(即拥有基座模型)和语言的概括能力(即推理能力)。未来的自动驾驶模型也将达到类似能力,可能只需几十个小时训练数据。”
在端到端时代,传统模块化验证方法失效。英伟达的解决方案是“神经元重建(Omniverse NuRec)”。即通过模型重建物理世界的像素级场景,并在其中编辑新元素(如滑板车、交通锥筒),再通过Cosmos改变天气、光照、时间,实现场景验证效率倍增。
这套工具链的核心价值在于:
- 每天200万次仿真验证:远超实车测试效率。
- 5-10倍的数据验证能力提升:大幅加速模型迭代。
- 产品级质量:已开放给生态合作伙伴使用。
3.商业化进展:L2++量产与L4愿景的双轨并进
在Counterpoint看来,英伟达虽然在L3/L4的布局很丰满,但L2++依然是其短期收入的主要来源。据英伟达介绍,其与奔驰的合作是其L2++量产的标杆案例,按照计划,
- 2025年已在欧洲区、美洲区完成首轮交付。
- 2026年将在全美进行点对点L2++落地,并拓展至欧洲多个城市。
- 2027年下半年,将完成全球化的L2++量产目标。
这套方案采用“混合式端到端”架构,即端到端模型负责“好开”(即通过模仿学习,实现接近人类驾驶的体验),同时并行跑一套基于规则的经典算法作为安全兜底。
L3/L4的商业化节点则主要出现在2027年到2028年,具体而言:
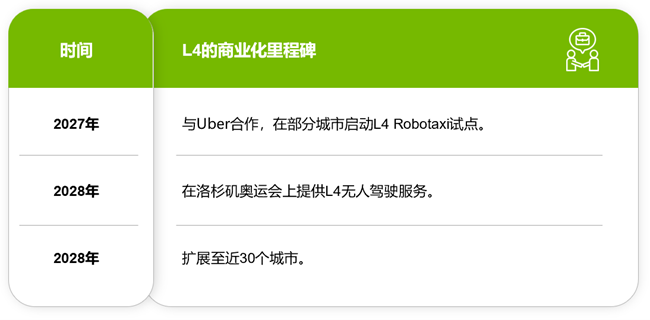
来源:英伟达
据英伟达介绍,L3/L4系统的核心架构特点包括:
- 双Thor ECU的冗余设计:单点失效下仍可实现有效操作。
- 传感器冗余:14个摄像头+9个毫米波雷达+1个激光雷达。
- 双算法并行:端到端+规则引擎,确保安全与体验兼顾。
吴新宙还对L3/L4提出了非常明确的技术判断,“从技术上看,已不存在大的卡点。即大模型和推理技术已解决了过去的主要难点,目前主要面临的是系统工程层面和具体工作量的问题”。同时,对于近期在智能驾驶行业讨论“是否跳过L3”的热点争议,他认为L3和L4技术难度差别不大,但商业模式有显著的不同,也就是说,
- L3适合个人消费者:10秒接管要求已能解放司机(如高速通勤时解放注意力,把时间交给用户自己)。
- L4适合做运营服务:由于需要远程操控能力,车企在短时间内在上百万辆车上部署远程接管系统并不现实。
4.市场策略:“每英里都有收益”的生态逻辑
英伟达通过“三个计算机和五层蛋糕”构建出技术深度护城河,形成了从云端训练、仿真到开源模型的闭环。因此,即使车企自研芯片,仍需英伟达的GPU去进行模型训练,通过仿真工具链去泛化模型的推理能力。
吴新宙明确表示:“我们希望未来的所有驾驶里程全是自动化的,每一英里我们都参与其中”。在Counterpoint看来,“每英里都有收益”,既是响亮的宣言,也是英伟达在自动驾驶领域的商业模式创新,即通过完整的自动驾驶生态,全方位为车企赋能,无论车企选择生态中的任何环节(即选择五层蛋糕中的任何一层),英伟达都能获得有价值的收益。
5.未来竞争焦点:算力只是起点,生态才是终局
过去几年,智驾芯片竞争的核心指标是TOPS算力。但吴新宙指出,未来竞争焦点将转向多维,包括更高的传感器(数据)的利用率、更高的帧率、对长时序推理的强化和更高的能效比,这些同时也是英伟达下一代芯片重点布局的方向。
当被问及竞争对手时,吴新宙的回答耐人寻味:“我们还是个生态玩家,没有谁是真正的竞争对手,我们希望大家能一起获得成功”。
在Counterpoint看来,这并非公关话术,而是其商业模式使然,即英伟达的收益来自AI在汽车行业的整体普及程度,而非单一芯片市场份额。举例来说,特斯拉自研芯片但仍使用英伟达云端训练,Waymo、Uber等也都在其自动驾驶的生态链上。
在中国市场,英伟达的生态系统也在持续壮大。在2026年北京车展上,英伟达携手多家生态伙伴,全面展示了智能出行领域的最新突破。最新的合作进展包括:
- 物理AI领域的合作进展
-
- 英伟达与奇瑞汽车正在辅助驾驶、座舱 AI、机器人三大领域合作,共同开发并布局物理 AI。
- 自动驾驶规模化落地
-
- 德赛西威、文远知行、小马智行、元戎启行公布了基于 NVIDIA DRIVE Hyperion 的最新进展,宣布正加速推动 Robotaxi 的规模化落地。
- 智能体助力车端 AI 体验升级
-
- 联发科技的天玑汽车座舱平台 C-X1 集成 NVIDIA Blackwell GPU 架构与深度学习加速器,并支持 NVIDIA CUDA 生态。
- 阿里巴巴通义大模型事业部将千问-Omni 全模态大模型运行于 NVIDIA DRIVE 平台。
- 联想车计算推出搭载 NVIDIA DRIVE AGX Thor 的舱驾智算平台 Auto AI Box。
- 火山引擎正基于 NVIDIA DRIVE AGX Thor 和 Orin 平台开发定制化的 AI 软件解决方案。
- 博泰车联将使用 NVIDIA DRIVE AGX Thor 的 AI 算力支持其 AI BOX。
- 中科创达宣布推出 AquaClaw,一个基于 NVIDIA NemoClaw 参考软件栈的车载 AI 智能体操作系统。
分析师观点: 自动驾驶的“ChatGPT时刻”已至
吴新宙在访谈中多次强调:“随着推理型大模型的出现,自动驾驶的ChatGPT时刻已经到了”。这一判断背后是对技术拐点的信心。过去困扰行业的极端情况问题,正通过基座模型+推理能力的组合被系统性地解决。从工程角度看,自动驾驶更多是“系统工程”而非“科学难题”。
正如黄仁勋所言,物理AI将推动GDP百倍增长,而自动驾驶是物理AI的最佳入口。在这场物理AI的马拉松中,英伟达选择做一个“生态玩家”——不追求垄断,但追求在每一英里的自动驾驶里程中都能有所贡献。
这是一个更长远的商业愿景,也是更具韧性的竞争策略。